Comunicaciones
entre PLC con LOGO 8
El
LOGO 8 puede comunicarse con otros LOGOs y dispositivos varios, para
empezar voy a explicar las comunicaciones con otro u otros LOGOs.
Recordar que la conexión es ethernet industrial, no es lo mismo que
el ethernet de datos entre equipos (PCs) que estamos habitualmente
usando cuando nos conectamos a una red que nos proveé de contenidos
de internet.
Maestro/esclavo.
Un
LOGO hace de maestro mientras el otro hace de esclavo y no hay
posibilidad de añadir mas esclavos, en este modo solo tenemos acceso
a las entradas y salidas de ambos hasta un máximo de 32 conexiones
entradas y salidas incluidas tanto digitales como analógicas.
Cliente/Servidor.
Un
LOGO hace de servidor y puede tener hasta ocho clientes conectados al
mismo servidor, evidentemente con la ayuda de un “hub o
concentrador”. En este modo podemos hacer mucho mas que unir
entradas y salidas de un LOGO a otro, como es la posibilidad de
conectar marcas de bit, un byte o un grupo de bytes, que pueden ir
tanto en un sentido como en otro es decir de cliente a servidor como
a la inversa.
Conectar
un S7 a un LOGO 8
próximamente.
Conectar
un HMI a un LOGO 8
próximamente
Conectar
un dispositivo cualquiera a un LOGO 8
próximamente
Como
crear una red Maestro/Esclavo.
Lo
primero abrir el LOGOSoft y crear un nuevo proyecto de red, en vista
de red > añadir dispositivo nuevo > se despliega un menú y
debemos de elegir que dispositivo es el que va hacer de maestro en
nuestro caso un LOGO 8.


Luego
volvemos a añadir un nuevo dispositivo, que esta vez sera el
esclavo.

Ahora
toca la programación, cuando hemos añadido el dispositivo maestro
se nos ha abierto también la ventana donde vamos a hacer la
programación de toda la red maestro/esclavo en una misma hoja
“Logo_1 diagrama”.

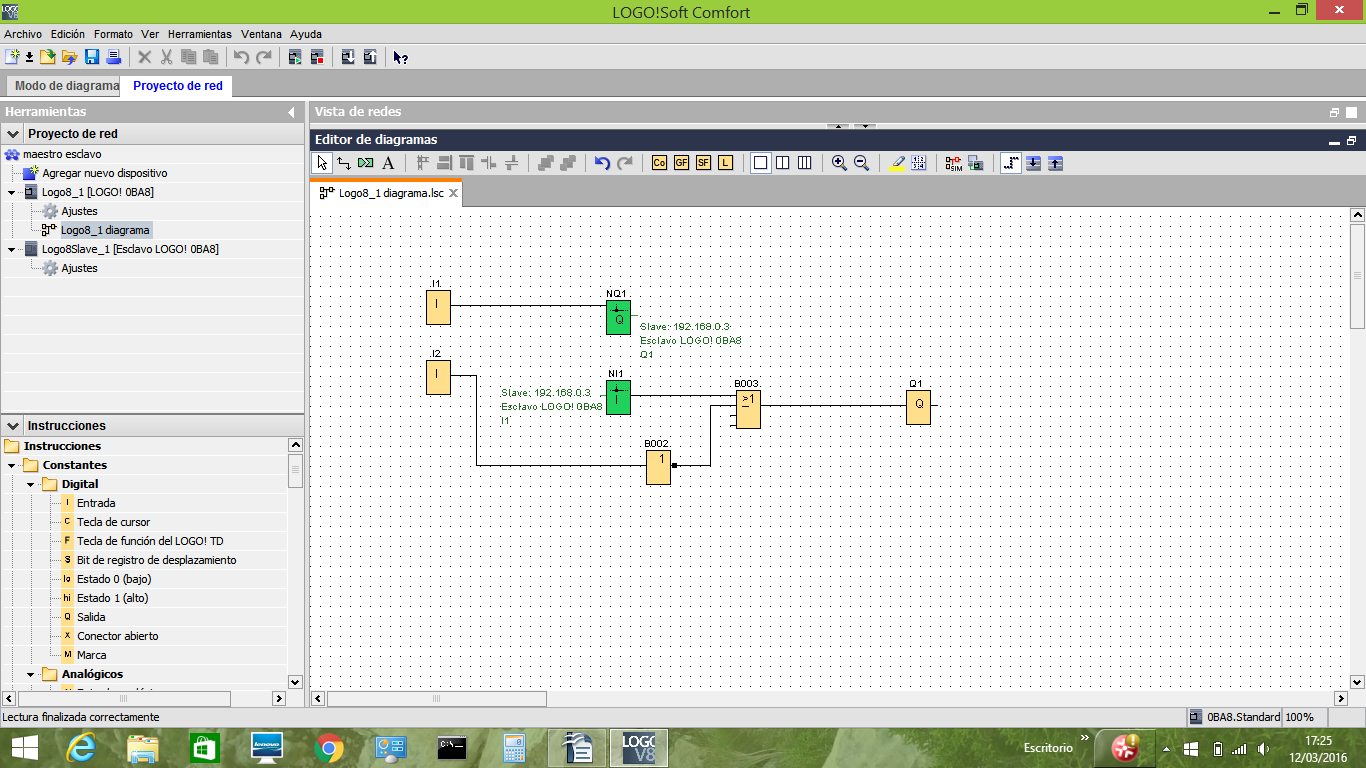
Como
se puede apreciar en la anterior imagen las entrada y salida de red
una vez correctamente con figuradas son las de color verde y
corresponde a una entrada o salida del esclavo. Esto se configura de
la siguiente manera, arrastramos una entrada o salida de red digital
o analógica hasta el diagrama
,
fijar con un click con el izquierdo y hacer un click con el derecho
sobre la figura, se nos abre el menú contextual, elegir propiedades,
se nos abre la ventana entrada de red, elegir en leer valor>
dispositivo remoto y se nos cambia la ventana, en el apartado
dispositivo remoto configurar como en la imagen.


La
figura de la entrada digital ahora se nos pone en verde, esto quiere
decir que la conexión a sido realizada correctamente. Tengo que
añadir que estas entradas y salidas de red no se pueden simular en
el programa LOGOSoft, el por que? lo desconozco, en cambio en el modo
de red cliente/servidor si que se pueden simular. Como podéis ver
este modo de red senos puede queda limitado según que aplicación deseemos darle.
Como
crear una red Cliente/servidor
Como
hemos hecho en el caso anterior, abrimos proyecto> proyecto de
red> añadir dispositivo en la ventana de vista de redes y elegir
dispositivo LOGO 8 y agregar tantos como se desee, en mi caso cuatro.




Como
podemos ver en la parte inferior de la imagen en el editor de
diagramas se nos abren cuatro pestañas una para cada uno de los
LOGOs que hemos conectado en red, por cierto la red cliente/servidor
es la que aparece de color azul claro y que en la realidad física
seria una red en topologia en estrella, es decir del LOGO servidor saldría un cable ethernet al hub o concentrador y de ahí repartiría
hacia los demás LOGOs. Volviendo al editor de diagramas, cada una de
las pestañas que tenemos son el sitio donde escribiremos el programa
de ese LOGO en concreto y posteriormente podremos crear las
conexiones que deseemos entre los distintos diagramas y por lo tanto
conexiones entre LOGOs que no quiere decir mas cables.
Para
crear las conexiones entre los distintos diagramas procederemos
siguiendo los pasos de las imágenes.



De
esta manera crearemos las conexiones entre diagramas o programas
entre LOGOs.